
Четырёхногий робот ANYmal вернулся за парту и многому научился за последнее время. Исследователи из Швейцарской высшей технической школы ETH Zurich использовали машинное обучение, чтобы научить его новым навыкам: теперь робот способен перелезать через препятствия и успешно преодолевать опасные участки.
ANYmal уже некоторое время без проблем справлялся с каменистой местностью швейцарских туристических троп. Теперь исследователи из ETH Zurich научили этого четвероногого робота новым навыкам: он демонстрирует удивительные способности к паркуру – виду спорта, основанному на использовании атлетических приёмов для преодоления препятствий в городской среде, который стал очень популярным. ANYmal также способен справляться со сложным рельефом, часто встречающимся на строительных площадках или в зонах бедствий.
Чтобы научить ANYmal этим новым навыкам, две команды, обе из группы под руководством профессора ETH Марко Хуттера с кафедры машиностроения и технологических процессов, использовали разные подходы.
Исчерпание механических возможностей



В одной из команд работает аспирант ETH Никита Рудин, который в свободное время занимается паркуром. «До начала проекта некоторые мои коллеги-исследователи считали, что возможности развития роботов на ногах уже исчерпаны», — говорит он, — «но у меня было другое мнение. На самом деле, я был уверен, что с механикой роботов на ногах можно сделать ещё многое».
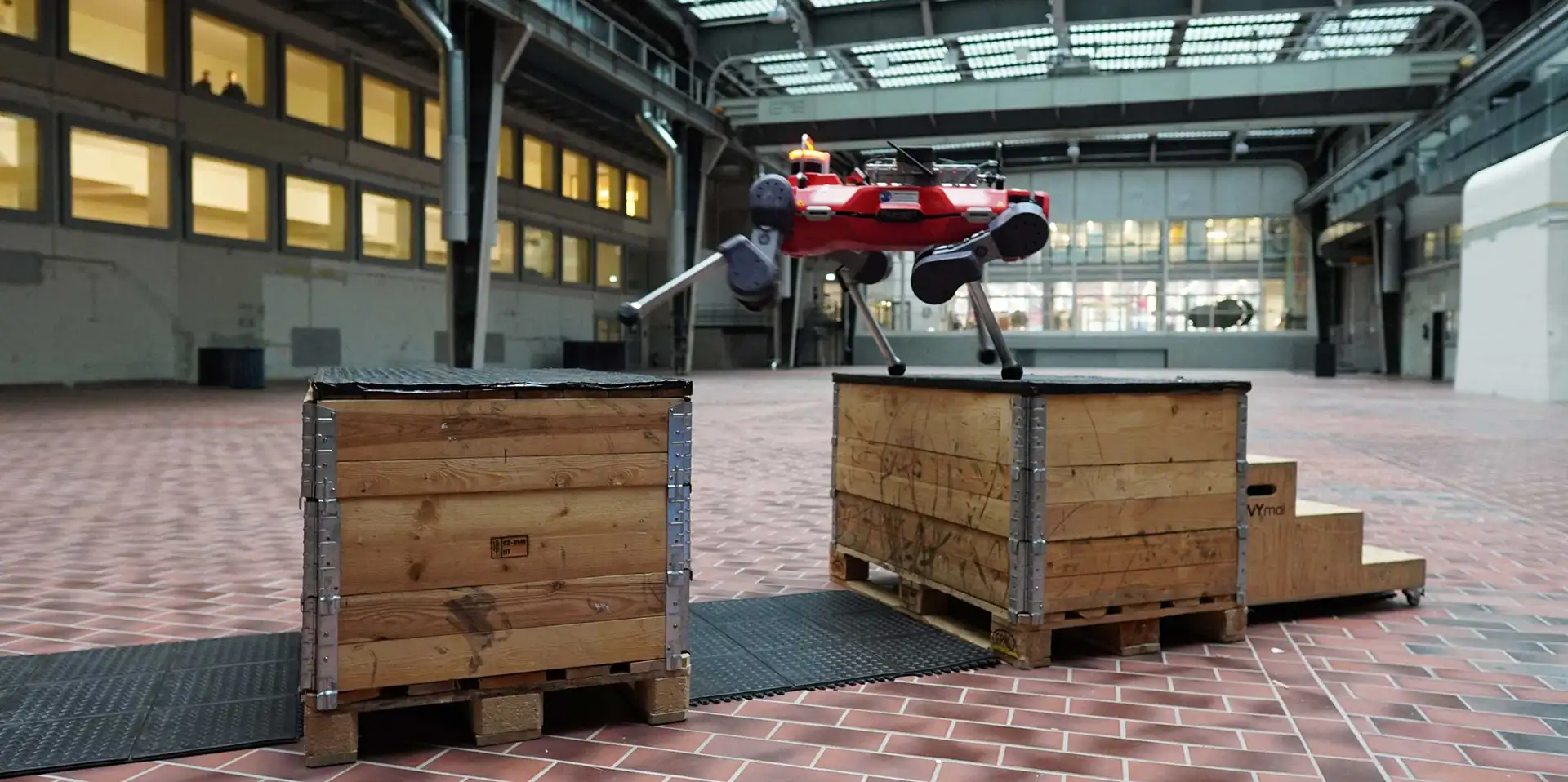
Используя свой опыт занятий паркуром, Рудин решил расширить границы того, что может ANYmal. И ему это удалось, благодаря машинному обучению, которое позволило научить четвероногого робота новым навыкам. Теперь ANYmal может взбираться на препятствия и выполнять динамические манёвры, чтобы спрыгивать с них.
В процессе обучения ANYmal действовал как ребёнок – методом проб и ошибок. Теперь, столкнувшись с препятствием, ANYmal использует свою камеру и искусственную нейронную сеть, чтобы определить, с какой преградой он имеет дело. Затем он выполняет движения, которые кажутся наиболее успешными, основываясь на своём предыдущем обучении.
Является ли это полным пределом технически возможного? Рудин предполагает, что в основном это так для каждого отдельного нового навыка. Но он добавляет, что это всё равно оставляет много возможностей для совершенствования. Сюда входит возможность робота выйти за рамки решения заранее определённых задач и вместо этого поручить ему преодолевать сложный рельеф, например, заваленные обломками зоны бедствий.
Сочетание новых и традиционных технологий
Подготовить ANYmal именно к такому типу применения была цель другого проекта, проведённого коллегой Рудина и аспирантом ETH Фабианом Йенелтеном. Но вместо того, чтобы полагаться только на машинное обучение, Йенелтен объединил его с проверенным подходом, используемым в теории управления, известным как управление на основе модели. Это упрощает обучение робота точным манёврам, таким как распознавание и преодоление проёмов и углублений в грудах обломков. В свою очередь, машинное обучение помогает роботу освоить паттерны движения, которые он затем может гибко применять в непредвиденных ситуациях. «Сочетание обоих подходов позволяет нам максимально эффективно использовать ANYmal», — говорит Йенелтен.
В результате, четвероногий робот теперь лучше справляется с тем, чтобы уверенно стоять на скользких поверхностях или неустойчивых валунах. ANYmal также скоро будет использоваться на строительных площадках или в любом месте, которое слишком опасно для людей – например, для осмотра рухнувшего дома в зоне бедствия.







